
수산업에서 지속가능한 어업·수산 양식을 위해 기존의 초음파나 온도계 등과 더불어 카메라를 통해 ‘보는’ 행위가 적극적으로 이루어지고 있다. 또한 얻은 화상·영상 등의 시각 정보를 해석·이용하는 것은 날마다 변화하는 대상 자원과 해양 환경에 대응하기 위해 없어서는 안 되는 것이다. 여기서는 양식어를 위한 개체 식별 기술, 수하식 가리비 양식업을 위한 3차원 계측 기술, 계측 행위로 구성된 심층학습 데이터 세트 생성 툴에 대해 소개한다. 양식어를 위한 개체 식별 기술 수산 양식에서 활어조 내 양식어의 정확한 마리 수를 파악하고 관리하는 것은 사료량과 생산출하량을 조절하기 위해 매우 중요하다. 그러나 대부분의 양식 대상은 수만 단위로 사육되기 때문에 중량 등에 따라 어림잡아 관리되는 경우가 많다. 농업 분야에서 R. Ishiyama 등은 멜론 표면의 그물 모양 무늬를 각 개체에서 고유한 것으로 가정, 사람의 지문 대조 기법과 적응하는 개체 식별 기법을 제안하고 있다. 필자 등은 참고등어의 체표면 무늬에 주목해 태그 등의 부여 없이 정확한 마리 수 관리 및 건강관리를 위한 개체 식별 시스템을 제안하고 있다. 여기서는 참고등어의 개체 식별 기법에 대해 소개한다. 1.
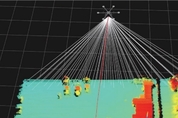
최근 Lidar(Light Detection and Ranging)를 이용한 3차원 계측은 자동운전을 위한 지도 작성, 이동 로봇의 내비게이션, 상공의 지형 계측 등 다양한 분야에서 이용되고 있다. 현재 이용되고 있는 Lidar의 대부분은 근적외 펄스 레이저를 이용해 대상물까지의 ‘거리’와 ‘방향’을 계측하는 것이다. 거리 계측은 Time of Flight (ToF) 방식에 의해 레이저를 발사한 후 대상물에 닿아 반사되어 되돌아올 때까지의 시간으로부터 산출한다. 레이저의 발사 각도는 회전형 Lidar의 경우에는 엔코더 등의 센서로 계측할 수 있기 때문에 대상물까지의 방향을 계측할 수 있다. 이것에 의해 Lidar에서 대상물까지의 상대적인 3차원 벡터를 계측할 수 있다. Lidar를 이동체에 탑재해 이동하면서 상대적인 3차원 계측을 하는 것으로, 대규모 환경의 3차원 계측이 가능해진다. 차량, 항공기, 이동 로봇 등의 여러 가지 플랫폼에 Lidar를 탑재해 환경을 계측하는 기법이 이용되고 있는데, 최근 드론, UAV(Unmanned Aerial Vehicle)에 Lidar를 탑재한 UAV-Lidar에 의한 3차원 계측이 급속히 확산되고 있다. 지금까지 UAV에
상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2024년 05월 21일 21시 33분




















